Using Python and Regular Expressions, I created a simple program to help with the arduously manual task of entering names into printed name cards for residents. This idea was sparked when my fellow Co-Head of Welfare and I were trying to design personalised cards to welcome residents in for the new year, and she was expressing her dread at having to type 120 names just for a small card, and possibly having to do it again for future initiatives.
This program is simple yet powerful, since it saves significant man-hours, yet can be applied to many other situations since any template can be made, and the corresponding text for each product can be customised simply through an Excel spreadsheet.
RC4 Coffee Academy
As the head of an Interest Group which is meant to be self-sustaining, we had to come up with creative ways to sustain our finances, which would include organising coffee drives and being involved in many college events. Virtually operating as a small business with some financial support from the college, we have to manage ourselves in that way as well with marketing, budgeting, and innovation.
This role gave me a good experience at management, since I had to balance the roles of internal management such as planning and logistics, but also liaisons with external parties and the college administrators.
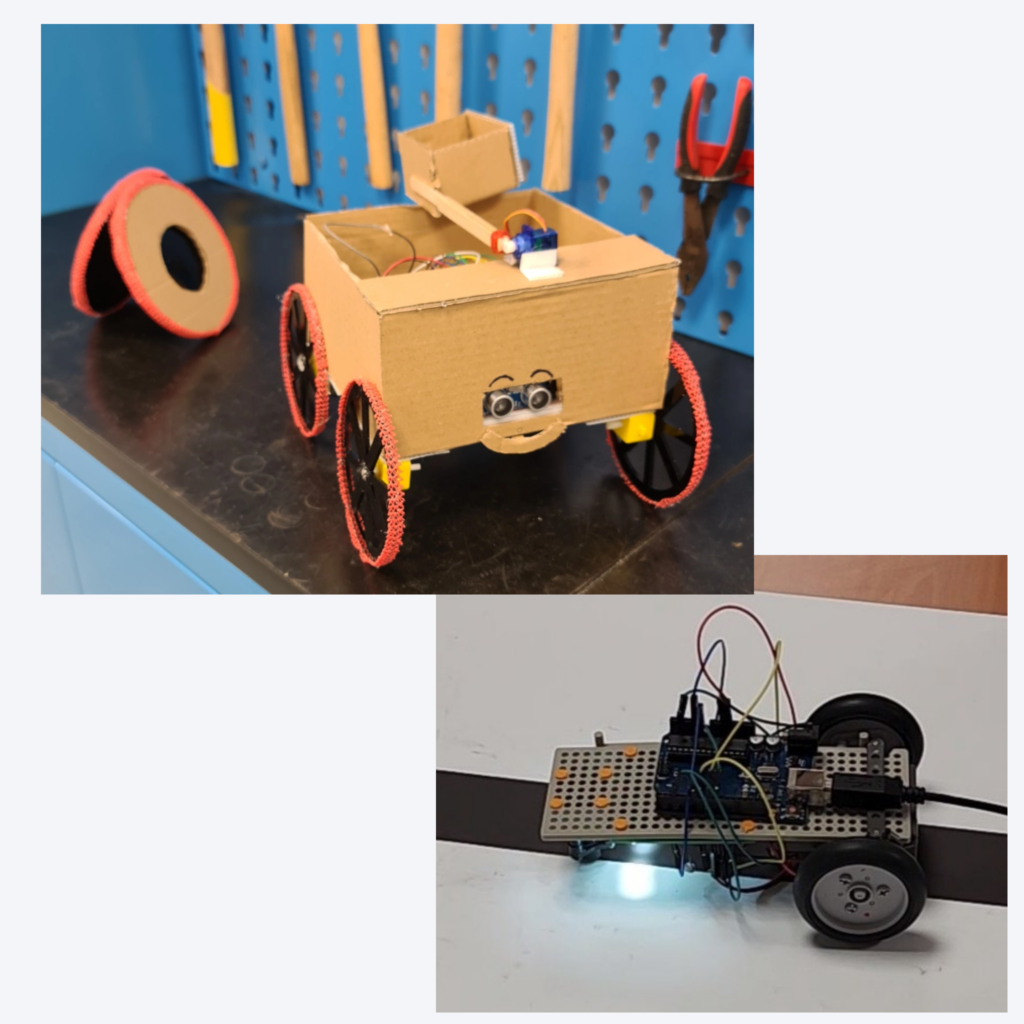
Arduino-based Robot Vehicles
As part of two modules I took in NUS (EG1311 Design and Make, ME2104 Engineering Principles and Practice II), I was able to learn and build robots that aimed to overcome different obstacles and accomplish certain tasks.
For the EG1311 robot (top-left), we had to design a robot that could go over a hump, a slope, and stop behind a wall before launching a projectile over it. Using a H-Bridge (L293DNE) motor driver, HC-SR04 ultrasonic sensor, SG90 servo motors, geared DC motors and an Arduino Uno, we created this robot that successfully accomplished its goals, after multiple rounds of iteration and redesigning.
For the ME2104 robot (bottom-right), we used a similar motor driver alongside a pre-designed PCB and commercial gearboxes to create the robot. The difference this time was that we were to rely on light-dependent resistors to guide the vehicle along the track, demarcated with a black line, and control the car depending on the light reflected by a LED affixed to the car. This tested our programming skills, especially in feedback control systems that this robot relied on.